 Soutenance de thèse de Guillaume Lapouge le 09/10/20
Soutenance de thèse de Guillaume Lapouge le 09/10/20

La soutenance de thèse de Guillaume Lapouge préparée au sein de l'équipe TIMC GMCAO et du LIRMM aura lieu vendredi 9 octobre 2020 à 14h30 sur le thème :
« Guidage robotisé d'aiguilles flexibles sous échographie 3D. »
- Lieu : Auditorium bât IMAG, 700 Avenue Centrale, 38400 Saint-Martin-d'Hères ⇒ Attention, Réservation obligatoire !
- Lien pour assister à la soutenance à distance : https://youtu.be/hCyI5DXr6A4
 Direction de thèse :
Direction de thèse :
- Jocelyne TROCCAZ, Directrice de Recherche CNRS, laboratoire TIMC, Université Grenoble Alpes, Directrice
- Philippe POIGNET, Professeur des Universités, laboratoire LIRMM, Université de Montpellier, Directeur
Jury :
-
M. Emmanuel PROMAYON, Professeur, Université Grenoble Alpes, laboratoire TIMC, Président
-
M. Brahim TAMADAZTE, Chargé de Recherche CNRS, Université Bourgogne Franche Comté, Femto-st, Rapporteur
-
M. Emmanuel VANDER POORTEN, Profresseur assistant, KU Leuven, Dept. of Mechanical Engineering, Rapporteur
-
M. Florent NAGEOTTE, Maître de Conférence, Université de Strasbourg, ICube, Examinateur
-
M. Mahdi TAVAKOLI, Professeur, Univ. of Alberta, Dept. of Electrical and Computer Engineering, Examinateur
 Résumé :
Résumé :Le guidage robotisé d’aiguilles flexibles consiste à commander, à l’aide d’un robot, une aiguille flexible au cours de son insertion dans des tissus. Parmi les avantages attendus de cette approche, nous pouvons citer l’augmentation de la précision du geste, la diminution des traumatismes causés aux tissus ou encore l’évitement de régions anatomiques sensibles. Cependant, s’il fait l’objet de nombreux travaux de recherche, le guidage robotisé d’aiguilles flexibles n’est pas encore une réalité clinique.
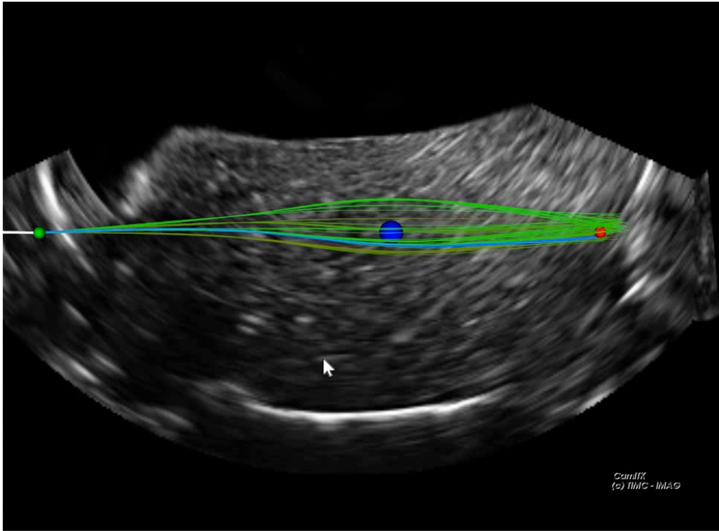
Cette thèse représente un pas de plus vers cet objectif à de multiples niveaux en proposant un guidage robuste sous échographie 3D peropératoire. Dans un premier temps, un algorithme de localisation de l’aiguille est détaillé. Il est capable d’estimer les propriétés mécaniques des tissus traversés et de s’adapter à la visibilité changeante de l’aiguille dans les volumes échographiques acquis. Dans un second temps, une méthode performante de suivi des mouvements de la zone anatomique à atteindre est présentée. Dans un troisième temps, un algorithme de planification adaptative de trajectoire permet la prise compte du bruit de mesure, des perturbations ainsi que d’éventuelles hétérogénéités des tissus à partir d’informations a priori sur les tissus traversés.
Un ensemble de validations expérimentales étayent les performances des différentes approches proposées, caractérisées par des erreurs de ciblage moyennes de 1 mm, 1.5 ± 0.9 mm, et 1.7 ± 0.8 mm, pour un guidage dans des fantômes homogènes, des fantômes hétérogènes et des tissus biologiques respectivement. Enfin, des essais sur sujet anatomique ont permis de statuer sur les perspectives d’amélioration des méthodes proposées.
Finalement, même si certaines problématiques du guidage robotisé d’aiguilles flexibles restent encore ouvertes, la solution proposée dans cette thèse se démarque par sa robustesse, sa compatibilité avec l’échographie 3D et sa nature patient-spécifique.
Mots clés :
Robotique médicale, Guidage d’aiguilles, Echographie 3D, Traitement des images, Planification de trajectoire, Observateur d’état